Laboratoire 0 : ATmega324. GPIO
Chapitres utiles de ATmega324P Datasheet
-
- Configuration des broches - page 15
-
- E/S-Ports - page 95
1. Introduction
1.1. Pourquoi ?
Q: Que faisons-nous ici? Où est ce que nous apprenons utilisé? Est-ce vraiment utile?
A: Pour répondre brièvement: "beaucoup", "partout" et "oui"; mais commençons par un exemple.
Vous venez de construire un nouveau PC et d'installer un éclairage RVB sur la RAM, les ventilateurs et la coque. Maintenant vient la question: qui "appuie" sur les boutons pour que les couleurs apparaissent comme définies dans le logiciel? Le CPU devrait-il s'asseoir et gérer le changement des couleurs? Ce serait un gaspillage de ressources. C'est là qu'un microcontrôleur entre en jeu! C'est un processeur plus petit et plus simple avec une tâche bien définie au sein du système.
1.2. Qu'est-ce qu'un microcontrôleur (µC) ?
TLDR: Un ordinateur dans une puce. Plus précisément, il s'agit d'un circuit intégré qui comprend une unité de traitement (CPU), une mémoire (RAM volatile, EEPROM non volatile, Flash, ROM) et divers périphériques qui lui permettent de communiquer avec l'environnement externe.
1.3. µC dans la nature
Nous les trouvons dans divers appareils tels que les téléphones, les appareils ménagers, les satellites, les avions, les usines, etc. Il existe une large gamme de microcontrôleurs disponibles, sélectionnés en fonction de l'application, en tenant compte principalement de l'optimisation des coûts et de la consommation d'énergie pour l'appareil où le C sera utilisé.
Example projects

- [1, 2] - Suivi des oiseaux
- [[3] - Palm size quad-copter] (http://www.rcgroups.com/forums/showthread.php?t1335765)
- [4] - Robot suiveur de ligne (Tare N' Bar)
- [5] - Robot de football (IronFoot)
- [6] - Robot sous-marin (R0X1)
- [[7] - Skateboard auto-équilibrant] (http://www.instructables.com/id/Easy-build-self-balancing-skateboardrobotsegway-/)
Pour plus d'exemples, vous pouvez commencer à chercher ici : https://www.hackster.io/projects/tags/microcontroller
1.4. Qu’y a-t-il à l’intérieur d’un µC ?
- Central Processing Unit (P core) avec des architectures de 8, 16, 32 ou 64 bits
- Mémoire de données volatiles (RAM) et/ou mémoire non volatile (Flash ou EEPROM)
- Mémoire de programme non volatile (Flash ou EEPROM)
- Ports d'entrée-sortie numériques à usage général (GPIO - Sortie d'entrée à usage général)
- Interfaces de communication série (USART, SPI, I2C, PCM, USB, SDIO, etc.)
- Interfaces Ethernet
- Interfaces pour affichages graphiques (LVDS, HDMI, ou autres protocoles de contrôle LCD dédiés)
- Minuteurs (internes ou utilisés pour générer des signaux périodiques - par exemple, PWM - ou comme chien de garde)
- Convertisseurs analogique-numérique et numérique-analogique (ADC, DAC), frontaux analogiques et autres circuits pour signaux analogiques
- Source de tension intégrée
- Interface de programmation et de débogage
Les périphériques représentent tout périphérique interne ou externe qui se connecte à un système informatique et étend ses fonctionnalités de base. Dans le cas d'un microcontrôleur, plusieurs de ces périphériques sont intégrés directement dans la puce (exemples ci-dessus). Bien qu'ils ne ressemblent pas à des périphériques PC (moniteur, carte graphique, clavier, souris, etc.), sans eux, le microcontrôleur ne serait pas en mesure d'interagir avec le monde extérieur.
2. Micropuce (Atmel) AVR
Tout au long du semestre, nous travaillerons avec des microcontrôleurs de la famille AVR de Microchip. Ceux-ci ont une architecture Harvard 8 bits et un jeu d'instructions réduit (RISC).
2.1. ATmega324P
Il s'agit d'un microcontrôleur 8 bits de la famille megaAVR, que nous utiliserons tout au long du semestre. Ses registres et son bus de données interne sont larges de 8 bits.
µC Spécifications
- 32 KB Flash (détermine la taille maximale du programme)
- 1 KB EEPROM
- 2 Ko de RAM
- Fréquence d'horloge maximale de 20 MHz
- Tension d'alimentation entre 2,7V et 5,5V
- 6 canaux PWM
- 8 canaux ADC avec une résolution de 10 bits
- 4 ports d'E/S numériques, chacun avec 8 broches, totalisant 32 broches d'E/S
- 3 minuteurs (deux 8 bits et un 16 bits)
- Interfaces de communication série: USART, SPI, TWI
- Interface de programmation ISP et interface de débogage JTAG
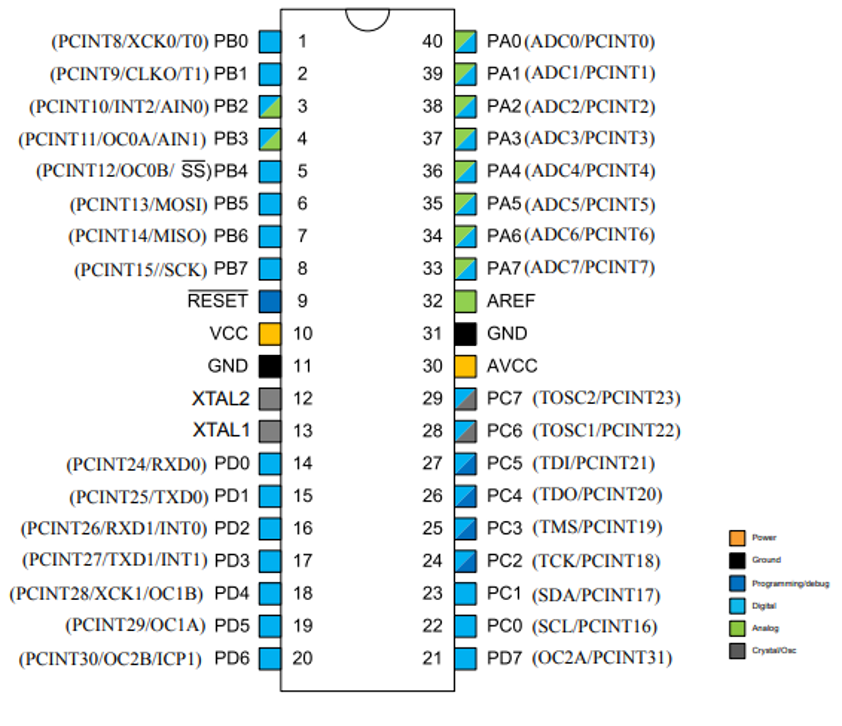
Nous allons apprendre à configurer ses broches et à interagir avec l'environnement externe par le biais du code. Ce microcontrôleur a 40 broches (voir ci-dessous), dont 5 pour les fonctions d'alimentation ou auxiliaires, tandis que 32 sont pour les E/S. Il a quatre ports: A, B, C et D.
Pour plus de détails, vous pouvez toujours consulter la fiche de données (la documentation technique résumée) du microcontrôleur. :)
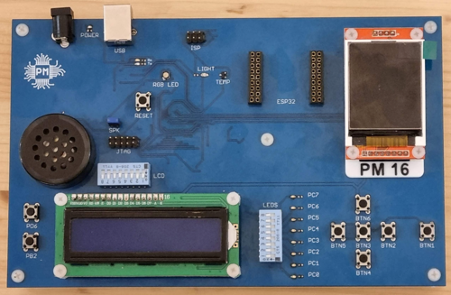
2.2. La Carte de development du laboratoire
La carte du labo est basé sur le contrôleur ATmega324P
- LSM9DS0 - Capteur inertiel à 9 axes (accéléromètre, gyroscope et magnétomètre)
- MPL3115 - Capteur altimètre barométrique
- Capteurs de température et de lumière ambiante
- 128x160 ST7735 écran LCD couleur avec lecteur de carte SD
- LED RVB
- écran LCD 16x2 caractères
- GPIO LED et boutons
- Connecteurs JTAG et FAI
- Interface USB programmable et interface de données
La carte de laboratoire est un circuit qui donne facilement accès aux broches du µC et contient des circuits d'alimentation, de protection et éventuellement le programmateur µC.
Le programmeur est une puce spéciale, parfois même un autre microcontrôleur, responsable du chargement du code dans la mémoire du µC. Nous ne pouvons pas connecter directement le µC aux lignes USB d'un PC; nous avons besoin d'un intermédiaire pour "traduire" cette information.
2.3. Pinout de la carte
LCD Displays
| Character LCD | GPIO Pin |
|---|---|
| RS | PC0 |
| RW | PC1 |
| EN | PC2 |
| D4 | PC3 |
| D5 | PC4 |
| D6 | PC5 |
| D7 | PC6 |
| Backlight | PC7 |
| Graphical LCD | GPIO Pin |
|---|---|
| CS | PB0 |
| RST | PB1 |
| A0 | PB4 |
| SDA | PB5 |
| SCK | PB7 |
| Backlight | PA7 |
I2C Sensors & Bus Addresses
| I2C | GPIO Pin | Chip | Address |
|---|---|---|---|
| I2C Enable | PA6 | LSM9DS0 | 0x1D (XM) 0x6B (G) |
| SCL | PC0 | MPL3115A2 | 0x60 |
| SDA | PC1 |
SD Card
| GPIO Pin | |
|---|---|
| CS | PA2 |
| MOSI | PB5 |
| MISO | PB6 |
| SCK | PB7 |
RGB LED
| GPIO Pin | |
|---|---|
| Red | PD5 |
| Green | PD7 |
| Blue | PB3 |
Miscellaneous
| GPIO Pin | |
|---|---|
| Temperature Sensor | PA0 |
| Ambient Light Sensor | PA1 |
| Buttons (BTN1 - 6) | PA5 |
| BTN 1 | PB2 |
| BTN 2 | PD6 |
| Speaker | PD4 |
3. Mettons-nous au travail
3.1. Actionneurs et transducteurs (capteurs)
Pour s'interfacer avec l'environnement externe, divers composants électroniques sont utilisés, soit comme actionneurs (qui modifient l'état de l'environnement externe) soit comme transducteurs/capteurs (qui sont influencés par l'environnement externe et fournissent des informations au microcontrôleur sur différents paramètres).
Exemples d'actionneurs:
- Ventilateurs
- Indicateurs sonores - buzzers
- Indicateurs lumineux
- Résistances chauffantes
Parfois, un élément d'activation est nécessaire pour alimenter un actionneur. Par exemple, si nous voulons démarrer un moteur, le C n'envoie qu'une commande de démarrage logique à un transistor, qui s'ouvre ensuite et permet à un courant plus important de passer (ici, "grand courant" est relatif par rapport aux quelques milliampères qu'un C peut produire).
Capteurs d'exemple:
- Boutons
- Photorésistances - leur résistance électrique est influencée par la quantité de lumière
- Thermistances - leur résistance électrique est influencée par la température
Selon le type de transducteur, le signal peut nécessiter un traitement avant d'être lu par le µC (conditionnement du signal). Par exemple, une photorésistance doit être utilisée dans un diviseur de tension ou un circuit de source de courant, tandis qu'un bouton peut être connecté directement au microcontrôleur.
3.1.1 LED
Les LED - diodes électroluminescentes - émettent de la lumière lorsqu'elles sont polarisées vers l'avant. Ne les confondez pas avec les ampoules traditionnelles, car elles fonctionnent de manière fondamentalement différente.
Selon les semi-conducteurs utilisés dans leur construction et la lentille en plastique qui agit comme une lentille de dispersion et un filtre optique, les LED peuvent émettre de la lumière dans différentes couleurs. Ne confondez pas les LED avec les ampoules! Alors que les ampoules émettent de la lumière en chauffant un filament de tungstène à des températures élevées, les LED émettent de la lumière en passant du courant à travers un matériau semi-conducteur (jonction p-n).
Les LED peuvent être utilisées comme indicateurs d'état (souvent utilisés dans divers appareils pour signaler qu'un appareil est allumé et exécute une fonction) ou pour l'éclairage, où des LED de haute puissance sont utilisées. En laboratoire, les LED sont utilisées pour indiquer l'état d'une broche.
Calcul de la résistance limite de courant
Les LED sont des diodes, de sorte que le courant qui les traverse augmente de manière exponentielle avec la tension appliquée.
Pour utiliser une LED comme indicateur d'état pour une broche (plus précisément, pour indiquer la présence de tension), le courant à travers la LED doit être limité. La façon la plus simple de le faire est de placer une résistance en série avec la LED.
Une LED est conçue pour fonctionner à un courant nominal (par exemple, 10mA). La chute de tension à ce courant pour les LED indicatrices de faible puissance est déterminée par la chimie de la LED (qui détermine également sa couleur). En laboratoire, parce que nous utilisons des LED avec des exigences de courant si faibles, nous pouvons les alimenter directement à partir des broches logiques du C.
Le circuit utilisé est le suivant:
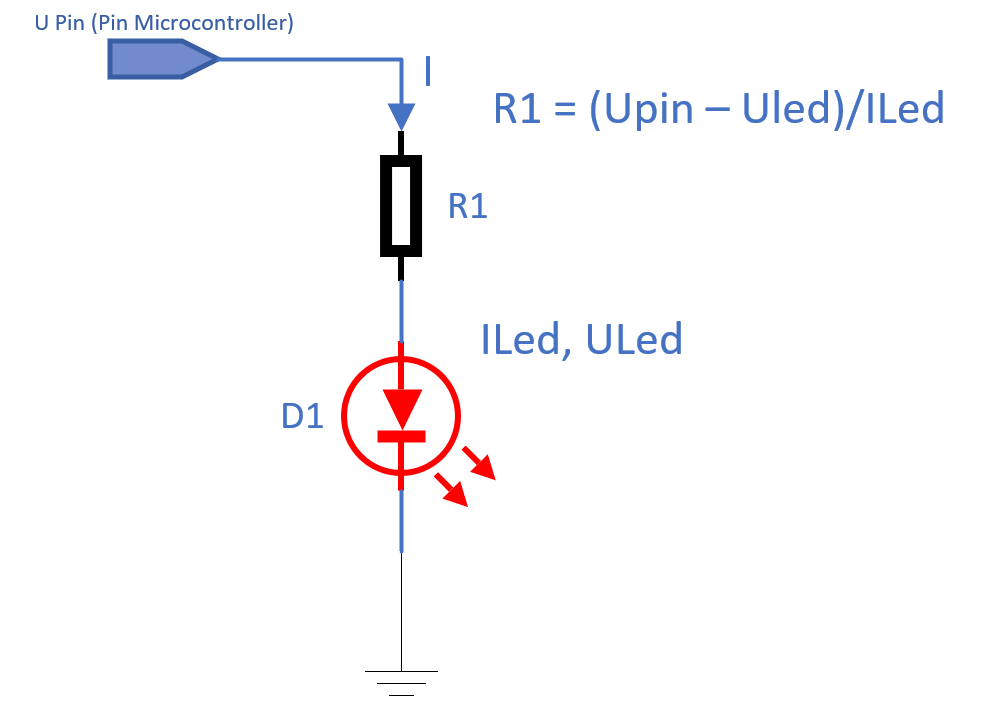
Solution: Si le microcontrôleur fonctionne à 5V et que nous voulons utiliser une LED rouge à 10mA, avec une chute de tension de 1,7V comme spécifié par le fabricant, nous devons utiliser une résistance de 330 ohms.
3.1.2 Boutons
La façon la plus simple pour un utilisateur d'interagir avec un microcontrôleur est d'utiliser des boutons. La façon correcte de connecter un bouton-poussoir dans ce laboratoire est montrée dans le diagramme ci-dessous:
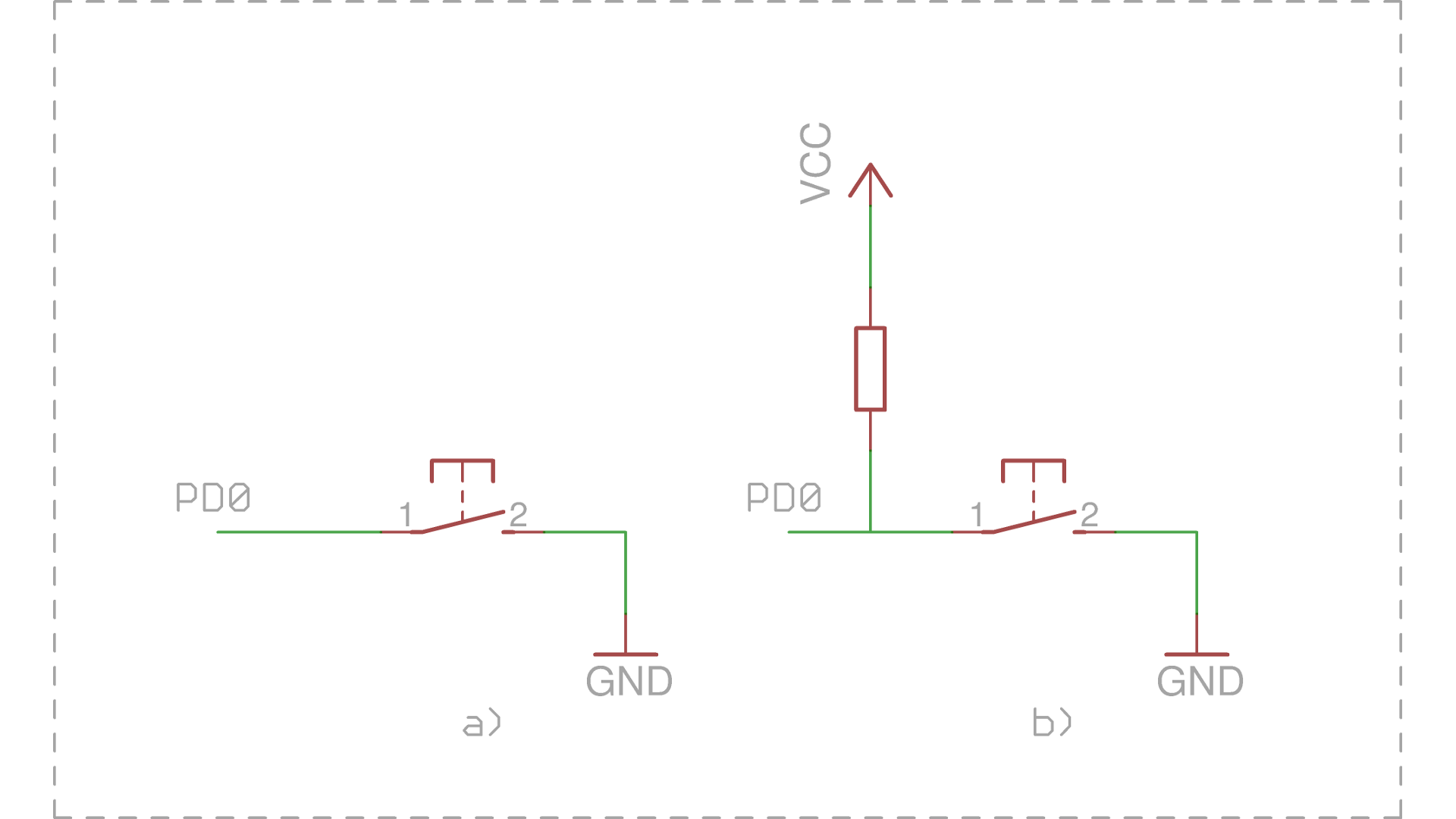
Raccordement d'un bouton-poussoir: a) incorrect, avec entrée flottante, b) correct, avec résistance de traction
a) Affiche un bouton connecté à la broche PD0 du C. Lorsque le bouton est pressé, l'entrée PD0 sera connectée à GND, ce qui signifie qu'elle sera dans l'état logique "0". Cette méthode de connexion est incorrecte car lorsque le bouton n'est pas pressé, l'entrée est dans un état non défini (comme si on la laissait flottante), elle ne serait pas connectée à GND ou Vcc!
b) Affiche la bonne façon de connecter le bouton, en utilisant une résistance d'extraction entre la broche d'entrée et Vcc. Cette résistance garantit que l'entrée reste dans l'état logique "1" lorsque le bouton n'est pas pressé en "tirant" le potentiel de la ligne à Vcc. Alternativement, une résistance d'extraction (connectée à GND) peut être utilisée, auquel cas l'entrée est conservée dans l'état logique "0".
En laboratoire: Pour économiser de l'espace externe, dans l'ATmega328P C, ces résistances sont intégrées dans le circuit intégré. Initialement, elles sont désactivées et peuvent être activées via un logiciel.
3.2. Utilisation des registres
Cela peut être considéré comme l'étape la plus importante lors de l'utilisation d'un µC. Nous devons apprendre à configurer le µC en interne afin qu'il remplisse les fonctions que nous désirons. Dans ce laboratoire, nous allons configurer les broches pour fonctionner comme E / S: certaines broches liront s'il y a une tension (entrée), tandis que d'autres produiront 0 volts ou 5 volts en fonction de nos commandes logicielles.
Pour clarifier la terminologie : quand nous disons nous fixons un registre ou écrivons dans un registre, nous ne faisons pas référence aux registres à usage général dans le processeur avec lequel vous avez peut-être travaillé dans IOCLA. Nous faisons référence aux adresses mémoire réservées dans le µC. Répétons ensemble: "Par registre, nous entendons une adresse mémoire."
Chaque fois que vous avez besoin de configurer un périphérique, la meilleure source pour trouver les paramètres exacts et leurs fonctions est toujours la fiche d'information de la µC. Comme il n'est pas pratique d'écrire dans le code des adresses comme *(0x04)
Pour écrire une valeur dans un registre, vous pouvez attribuer une valeur directement. Cependant, cette méthode ne rend pas le code très facile à comprendre. Notre recommandation est d'utiliser des masques de bits ((1 x)) ou la macro _BV(x). Nous recommandons également d'utiliser le nom de broche au lieu de son index, car les noms sont indicatifs de leur fonction (par exemple, dans le registre ADCSRA du convertisseur bit analogique-numérique).
| Operation | Syntax |
|---|---|
| Set bit to 1 |
macro |= (1 << bit_index)
|
| Set bit to 0 |
macro &= ~(1 << bit_index)
|
| Toggle bit |
macro ^= (1 << bit_index)
|
| Read bit |
macro & (1 << bit_index)
|
Exemple : Utilisation des registres
DDRB = 8; // NOT RECOMMENDED.
DDRB = (1 << 3); // Also not recommended, as it hardcodes the pin index.
DDRB |= (1 << PB3); // RECOMMENDED.
DDRB |= _BV(PB3); // RECOMMENDED.
Pour plus de détails sur le travail avec les bits dans les registres, reportez-vous à la section tutoriel sur le wiki.
Ne vous inquiétez pas, nous aurons de nombreuses sessions de laboratoire pour vous habituer à travailler avec des registres et à configurer le C. Nous vous encourageons à faire des efforts dès maintenant au début pour un voyage plus facile tout au long du semestre.
3.3. Registres des E/S
Pour ce laboratoire, nous vous avons épargné la recherche dans la fiche technique, qui peut sembler compliquée au premier abord, et avons résumé les adresses mémoire (registres) que vous devez modifier pour compléter ce laboratoire.
Le microcontrôleur ATmega324 offre 4 ports d'E/S, chacun avec 8 broches. En interne, chaque port dispose de trois registres 8 bits qui permettent à l'utilisateur de contrôler le flux de données au niveau de la broche: vous pouvez écrire/lire des données depuis/vers le port respectif. Ces trois registres sont:
DDRn- Registre des directions de données- Définit la direction des broches de port
- Si le bit x vaut 0, la broche x vaut entrée
- Si le bit x vaut 1, la broche x vaut sortie
PORTn- Registre des données- Définit les valeurs de sortie des broches ou active/désactive les résistances de traction
- Si le bit x vaut 0 :
- Si la broche x est output, ce sera LOW
- Si la broche x est entrée, la résistance de traction sera désactivée
- Si le bit x est 1 :
- Si la broche x est output, ce sera HIGH
- Si la broche x est entrée, la résistance de traction sera activée
PINn- Epingles d'entrée Adresse- Si la broche est entrée, nous pouvons lire les données du port respectif
- Si la broche x est LOW, alors le bit x sera 0
- Si la broche x est HIGH, alors le bit x sera 1
- Si la broche est output, nous pouvons la basculer automatiquement
- Si nous écrivons 1 au bit x, le bit correspondant dans
PORTnsera automatiquement inversé (fonction toggle)
n peut être A, B, C ou D, selon le port sélectionné. x peut être compris entre 0 et 7.
Une description détaillée des ports et de leurs registres correspondants peut être trouvée dans la fiche technique ATmega324, dans le chapitre Ports d'E/S.
3.3.1 Exemple de traitement des sorties
Supposons que nous ayons une LED connectée à la broche 1 du port B (appelée PORTB1 ou PB1). Pour allumer ou éteindre la LED, procédez comme suit:
- Configurer la broche
PB1comme sortie :- Le bit 1 (
PB1) dans le registreDDRBdoit être mis à 1 DDRB |= (1 << PB1);
- Le bit 1 (
- Pour allumer la LED, réglez la broche
PB1à HIGH:- Le bit 1 (PB1) dans le registre
PORTBdoit être réglé sur 1 PORTB |= (1 << PB1);
- Le bit 1 (PB1) dans le registre
- Pour désactiver la LED, réglez la broche
PB1sur LOW:- Le bit 1 (
PB1) dans le registrePORTBdoit être mis à 0 PORTB &= ~(1 << PB1);
- Le bit 1 (
3.3.2. Exemple de traitement des entrées
Supposons que nous ayons un bouton connecté à la broche 4 du port D (appelé PORTD4 ou PD4), en utilisant la connexion correcte du cas b) montré précédemment. Pour déterminer l'état du bouton (appuyé ou libéré), procédez comme suit:
- Configurer la broche
PD4comme entrée :- Le bit 4 (
PD4) dans le registre DDRD doit être mis à 0 DDRD &= ~(1 << PD4);
- Le bit 4 (
- Pour déterminer si le bouton est pressé, lisez la valeur de la broche à laquelle il est attaché. Il sera 1 lorsque le bouton est relâché et 0 lorsque le bouton est pressé:
- Lire le bit 4 (
PD4) dans le registrePIND: char val = PIND & (1 << PD4);
- Lire le bit 4 (
4. Développer des programmes pour AVR
Développement et compilation sans PlatformIO
4.1. Développement et compilation
Pour le développement de programmes, nous pouvons utiliser n'importe quel éditeur de texte.
Dans les laboratoires, nous écrirons le code C, pas l'assemblage (AVRASM), en utilisant le compilateur avr-gcc. WinAVR inclut la bibliothèque C, avr-libc, qui doit être installée sur les systèmes Linux et Windows (WinAVR.
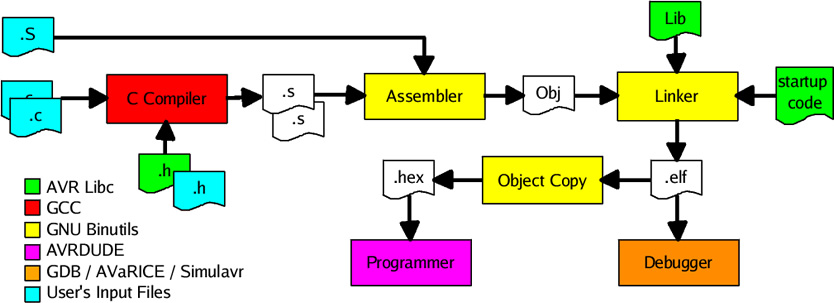
Bien que notre microcontrôleur soit 8 bits, en code C, nous pouvons utiliser des variables entières de 16/32/64 bits et même des nombres à virgule flottante. Le compilateur gère la traduction des instructions en code d'assemblage qui fonctionne sur une architecture 8 bits.
Comme pour les systèmes Linux, pour programmer AVR, nous avons besoin de quelques utilitaires : le compilateur avr-gcc, avr-libc et AVRDUDE. Pour installer ces utilitaires, Homebrew est recommandé. Utilisez les commandes suivantes :
brew install avrdude
xcode-select --install
brew tap osx-cross/avr
brew install avr-gcc
Pour fonctionner sur les processeurs M1/M2/M3, vous devez installer au moins la version 11 d'avr-gcc. Plus d'exemples peuvent être trouvés ici.
4.2. Programmation du microcontrôleur
Un microcontrôleur peut être programmé en utilisant diverses méthodes, telles que la programmation d'interface série, un programmeur ISP (In-System Programming) en utilisant l'interface SPI, ou un bootloader.
Dans ce laboratoire, nous utiliserons la dernière méthode car elle élimine le besoin de composants externes supplémentaires pour télécharger le fichier hexadécimal. Un bootloader est un programme préchargé (utilisant, par exemple, un programmeur FAI) à la fin de la mémoire du programme du microcontrôleur. L'exécution du code téléchargé commencera à partir de la section de démarrage. L'inconvénient de cette méthode est l'espace mémoire occupé par le bootloader.
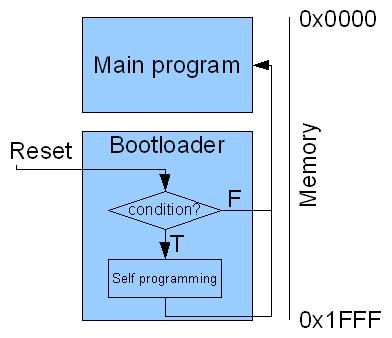
L'utilisation d'un bootloader nécessite de remplir une condition au démarrage du microcontrôleur. Sur les cartes de laboratoire, il s'exécute sur chaque RESET, mais nous pouvons définir n'importe quelle condition détectable par le processeur (par exemple, si un bouton est pressé ou non). Certains microcontrôleurs ont une ROM dédiée pour le bootloader, installée en usine (par exemple, STM32).
Pour télécharger le programme sur le microcontrôleur, nous devons utiliser un utilitaire sur l'ordinateur. Ci-dessous un exemple d'utilisation de l'utilitaire vrdude sur Linux et Windows:
$ avrdude -c arduino -P /dev/ttyUSB0 -b 57600 -p atmega324p -U flash:w:lab0.hex:a
C:/> avrdude -c arduino -P COM12 -b 57600 -p atmega324p -U flash:w:lab0.hex:a
4.3. PlatformIO
Pour une solution toolchain et IDE tout-en-un, installez PlatformIO. Après avoir installé l'extension PlatformIO dans VSCode, créez un nouveau projet ciblant ATmega324P en tant que plate-forme/microcontrôleur et ajoutez la ligne suivante à platformio.ini :
upload_protocol = urclock
Alternative à PlatformIO
4.3.1 Alternative à PlatformIO : Installation séparée de la chaîne d'outils avr-gcc
D'accord, vous êtes un développeur de logiciels hardcore et vous voulez installer la chaîne d'outils directement à l'aide de votre IDE préféré (qui est-ce que je plaisante, vous travaillez directement dans Vim). Vous avez cette option aussi, mais il vient avec quelques maux de tête. Si vous voulez installer juste la chaîne d'outils, sans un IDE, vous aurez besoin avr-gcc, make et avrdude pour compiler et programmer les guides de développement.
Il est possible que l'installation par défaut d'avrdude ne prenne pas en charge le bootloader urclock sur la carte, et que vous receviez un message d'erreur lors de l'exécution de make upload. Pour résoudre ce problème, vous devez installer avrdude 7.2-arduino.1 (ou installer PlatformIO directement, qui est livré avec la version correcte d'avrdude).
Nous vous recommandons également d'utiliser un IDE pour le développement de code. Si vous préférez VSCode (sans l'extension PlatformIO), consultez ce tutorial.
Avertissement: Support du programmeur urclock (également connu sous le nom de urprotocol), utilisé par nos cartes, a été seulement ajouté dans avrdudeSystem > 7.1. Assurez-vous de ne pas installer une version récente (par exemple, 7.3).
4.4. Bonjour tout le monde (Hello World)
Nous écrirons un programme qui active et désactive une LED à des intervalles de 500 ms. La LED ciblée est la LED verte sur la carte du laboratoire. Ceci se fait en modifiant la tension d'une des broches du microcontrôleur, dans notre cas, la broche 7 du port D (PD7).
#include <avr/io.h>
#include <util/delay.h>
int main() {
/* Set pin 7 of port D as an output. */
DDRD |= (1 << PD7);
while(1) {
/* Toggle the state of the pin. */
PORTD ^= (1 << PD7);
_delay_ms(500);
}
return 0;
}
Pour compiler avec PlatformIO, appuyez sur Ctrl+Alt+B, puis Ctrl+Alt+U pour télécharger.
Utilisation d'un Makefile personnalisé pour la compilation
Si vous avez installé la chaîne d'outils séparément, vous devez utiliser le Makefile suivant :
# Linux
PORT ?= /dev/ttyUSB0
# Windows
#PORT ?= COM1
all: main.hex
main.hex: main.elf
avr-objcopy -j .text -j .data -O ihex $^ $@
avr-size main.elf
main.elf: main.c
avr-gcc -mmcu=atmega324p -DF_CPU=12000000 -Os -Wall -o $@ $^
upload: main.hex
avrdude -c urclock -P $(PORT) -b 57600 -p atmega324p -D -xnometadata -U flash:w:$<:a
clean:
rm -rf main.elf main.hex
Le compilateur utilisé est avr-gcc. Les drapeaux ont les significations suivantes :
- -
mmcu: Informe le compilateur du type de microcontrôleur pour lequel le code doit être généré. - -
DF_CPU12000000: Définit la macro F_CPU, qui indique la fréquence d'horloge du microcontrôleur. - -
Os: Optimise le programme pour l'utilisation de la mémoire (assez utile compte tenu de la mémoire limitée sur la puce). - -
Wall: active tous les messages d'avertissement.
Le fichier à programmer sur la carte doit être au format ihex. Par conséquent, il est nécessaire d'extraire les données et les sections de code du fichier ELF compilé et de les intégrer dans un fichier ihex. Cette étape est effectuée à l'aide de l'utilitaire avr-objcopy.
La commande avr-size indique la quantité de mémoire occupée par les différentes sections du programme. Gardez à l'esprit que dans la mémoire SRAM pour les données, outre la section .data, la pile sera également placée. Pour exécuter le programme sur le microcontrôleur ATmega324, la section .text doit être inférieure à 32 Ko, et la section .data doit être inférieure à 2 Ko.
Le résultat de la compilation est le fichier main.hex. Ce fichier est ensuite téléchargé sur le microcontrôleur à l'aide de la règle upload.
5. Exercices
Tâche 0 Commençons par vérifier la configuration.
- Installez votre IDE préféré / requis et exécutez l'exemple Hello World sur la carte de développement dans le laboratoire.
Tâche 1
- Modifiez l'exemple Hello World pour que la LED allumée soit rouge au lieu de verte. Conseil : Trouvez la broche et le port auxquels cette LED (qui fait partie de la LED RGB) est connectée dans le schéma de la carte / documentation du tableau sur GitHub.
Remarque: La LED RVB a une anode commune, donc l'écriture d'un 1 logique sur la broche GPIO correspondante éteint la LED.
Tâche 2
- Modifier l'exemple Bonjour le monde de sorte que la LED change de couleur lorsque le bouton 1 (
PB2) est pressé. - Gardez la LED verte allumée par défaut.
- Configurer les registres pour définir
PB2comme entrée. - Configurez la LED pour ajouter une autre couleur (rouge/bleu) lorsque vous appuyez sur le bouton. (N'oubliez pas d'activer la résistance de traction interne du µC pour
PB2).
Tâche 3
- À partir de l'application créée dans la tâche 2, modifiez la fonctionnalité du bouton 1 pour parcourir les couleurs LED sur des pressions successives (première pression - rouge, deuxième pression - vert, troisième pression - bleu, etc.).
- Utilisez le bouton 2 pour basculer entre une LED clignotante (clignotement) et un état solide (une pression - clignotement, deuxième pression - toujours allumée, pression suivante - clignote à nouveau, etc.).