Laboratoire 1 : USART. Débogage
Comme dans tout travail d'ingénierie, des bogues peuvent et vont apparaître dans les systèmes embarqués. Dans des conditions de fonctionnement, il est crucial d’avoir un moyen de communication avec l’appareil embarqué. Afin d'avoir un aperçu des méthodes de débogage possibles, nous allons d'abord fournir une brève introduction, puis étudier en détail l'interface série USART, couramment utilisée pour la communication série entre deux dispositifs.
1. Quelles sont les différences avec le débogage logiciel classique ?
Le débogage des systèmes embarqués est plus complexe que celui des logiciels classiques en raison de plusieurs facteurs :
- Les systèmes embarqués sont plus difficiles à déboguer car les outils de débogage matériels dédiés (logiciels, IDE, Lauterbach, etc.) sont beaucoup plus coûteux et plus complexes à utiliser que les outils de débogage standard.
- L’utilisation d’un débogueur générique (par ex., Remote GDB) présente plusieurs problèmes. Les débogueurs génériques nécessitent une pile réseau ou des protocoles compatibles avec le matériel utilisé. Même si nous implémentons une telle pile, nous ne pouvons pas garantir qu'elle fonctionne parfaitement.
- Même avec un débogueur spécialisé (comme une sonde Lauterbach), des configurations spécifiques sont souvent nécessaires pour fonctionner avec votre matériel (par ex., langage de script Practice pour Lauterbach T32).
- Le débogage invasif peut affecter le comportement de votre code—considérez les systèmes d’exploitation en temps réel (RTOS), les systèmes multiprocesseurs (SMP) ou votre circuit (par ex., modification du circuit pour mesurer l’intensité du courant).
- Le matériel en phase initiale peut contenir des erreurs de conception qui affectent le processus de débogage.
- Même l'affichage de messages d'erreur peut poser problème, car parfois, il faut implémenter cette fonction soi-même, ce qui peut introduire de nouveaux bogues.
Malgré ces défis, les principes de débogage restent les mêmes que pour les logiciels de haut niveau : il faut comparer le comportement attendu du système (code/circuit) avec ce que le système fait réellement.
2. Outils nécessaires
La visibilité au niveau matériel est obtenue par une forme d’entrée/sortie (si disponible) :
- Débogage par LED - vérification des états vrai/faux.
- Messages via l'interface série / USART - débogage via USART, Bluetooth, etc.
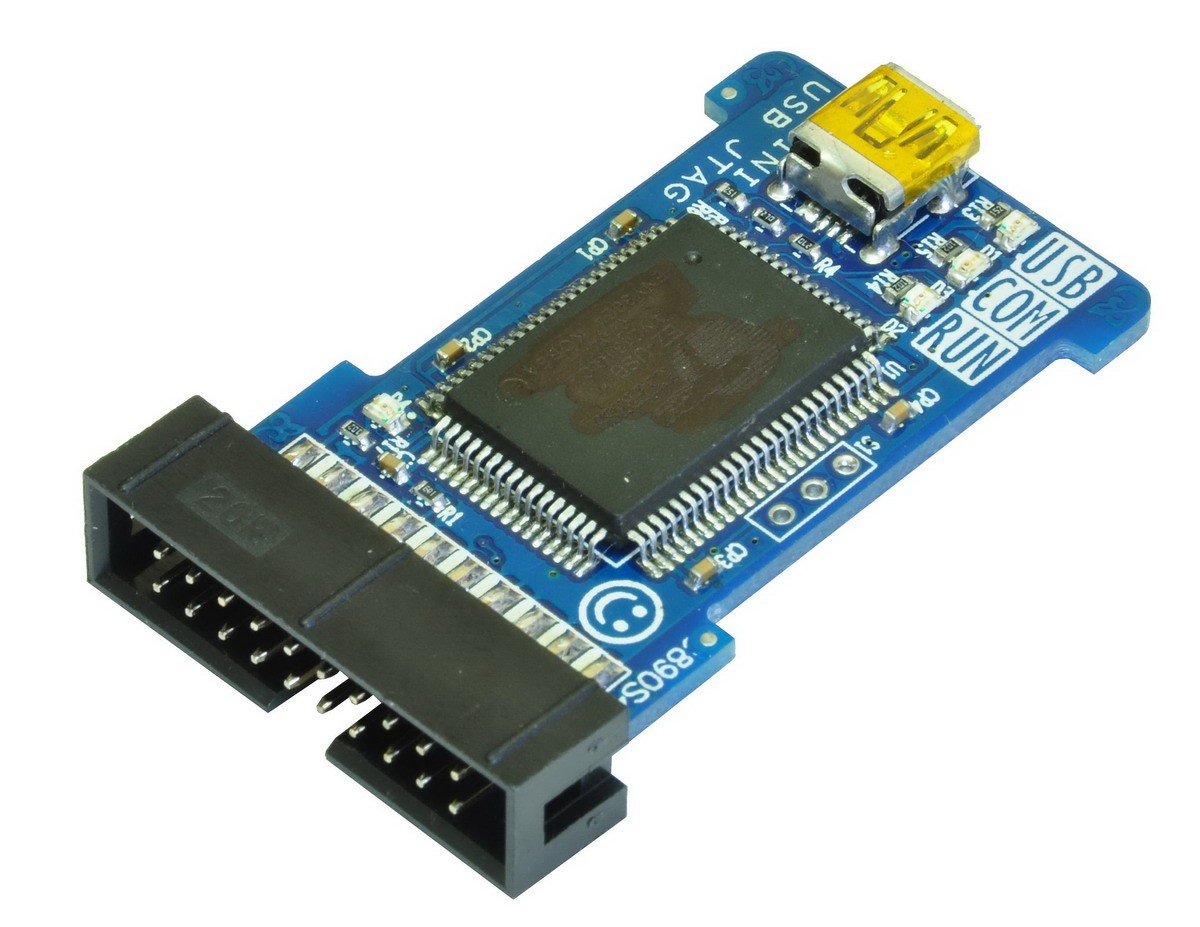
- Débogueurs avancés pour afficher et modifier la mémoire/les registres (voir JTAG ci-dessous).
- Tests en boucle (connecter les sorties aux entrées) pour obtenir des informations sur l’envoi de commandes vers des périphériques externes.
Outils de mesure :
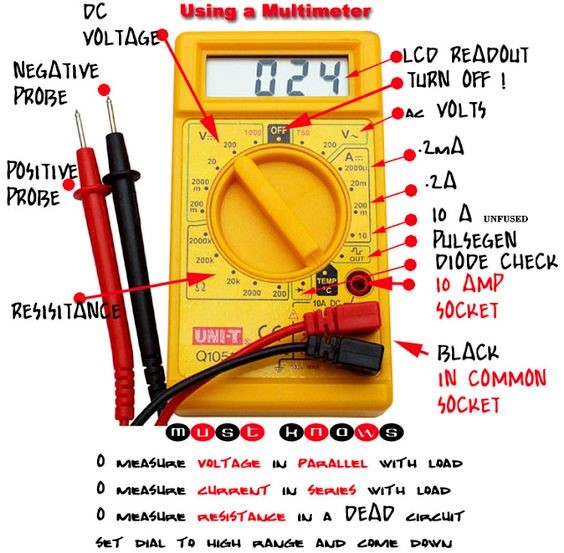
- Multimètres (pour les valeurs statiques)
- Résistance : connectez simplement un composant du circuit entre les sondes.
- Tension : connectez en parallèle—sonde positive (rouge) au point de potentiel le plus élevé, sonde négative (noire) au point de potentiel le plus bas. Pour mesurer le potentiel en un seul point : connectez la sonde négative à la masse (GND) et la sonde positive au point désiré.
- Courant : connectez le multimètre en série avec le circuit à mesurer. Vous devez placer la sonde rouge sur le fil d'un composant et la sonde noire sur le conducteur suivant. Le multimètre agit comme un fil dans votre circuit. Si vous déconnectez le multimètre, le circuit ne fonctionnera pas.
- Toujours commencer par régler l’échelle du multimètre au maximum, puis l’ajuster progressivement pour obtenir la mesure la plus précise.
- Vérification de la polarité d’une diode : sélectionnez le mode test de diode. Si vous placez la sonde négative sur l’anode et la sonde positive sur la cathode, le multimètre émettra un bip ou affichera une chute de tension à travers la jonction p-n.
- Vérification des courts-circuits/connectivité : utilisez le mode buzzer si disponible en mode mesure de résistance—si l’appareil émet un son, cela signifie qu’il y a un court-circuit/connexion entre ces deux points.
- Oscilloscope
- Analyseurs logiques (pour les signaux numériques)
- Analyseurs de protocoles (pour les protocoles embarqués tels que I2C, SPI, etc.)
- Débogueurs basés sur JTAG - peuvent offrir des fonctions très avancées : lecture/modification de la mémoire, interaction avec le noyau, arrêt de l’horloge du système, etc.
Exemple de processus de débogage
Un processus de débogage typique pourrait être le suivant :
- Vérifiez attentivement la fiche technique et le schéma. Assurez-vous d'accéder aux bons registres. Un autre problème possible est un mauvais câblage entre les périphériques et les broches.
- Vérifiez d'abord si le débogage est possible en utilisant des messages de débogage et/ou des messages via l'interface série.
- Si une pile Ethernet est disponible sur l’appareil, envisagez d’utiliser SSH, NFS, etc., pour un débogage par messages.
- Si aucune pile réseau n’est disponible, vérifiez l’accès à des protocoles plus simples comme l’UART. Testez en connectant un périphérique via UART, tel qu'un PC, un module Bluetooth, un écran LCD, etc.
- Dans les cas extrêmes ou pour des programmes très simples, lorsque les options ci-dessus ne sont pas disponibles, le débogage par LED peut être utilisé.
- Isolez le problème à l’aide d’outils de mesure : multimètres, oscilloscopes, analyseurs logiques.
- Si l’appareil prend en charge les débogueurs matériels (JTAG, Lauterbach, etc.), leur utilisation est souvent la méthode la plus efficace pour le débogage.
3. Interface série USART
L’interface série est le moyen le plus simple de communiquer avec un microcontrôleur pour lire des données ou envoyer des commandes. Du point de vue du microcontrôleur, la communication série repose uniquement sur deux lignes de données :
- Une ligne de transmission, marquée Tx.
- Une ligne de réception, marquée Rx.
La communication est en mode full-duplex, ce qui signifie que la transmission et la réception peuvent se produire simultanément.
La transmission de données asynchrone s’effectue en trames, chaque trame étant constituée de plusieurs bits, selon le format illustré ci-dessous.

Un bit de démarrage est d'abord transmis, suivi d'un mot de données. Ensuite, un bit de parité optionnel peut être ajouté pour la détection d'erreurs de base, suivi d'un ou deux bits d'arrêt.
Le microcontrôleur ATmega324P comprend deux périphériques USART (Universal Synchronous-Asynchronous Receiver/Transmitter) pour la communication série. Lors de l’initialisation de ce périphérique, les étapes suivantes doivent être effectuées :
- Sélection de la vitesse de transmission des données - le baud rate (valeurs courantes : 9600, 19200, 38400, 57600, 115200).
- Choix du format de trame (nombre de bits de données, bits d’arrêt et inclusion ou non d’un bit de parité).
- Activation de la transmission et de la réception des données sur les lignes
RXetTX.
Le baud rate est le nombre de symboles/impulsions par seconde dans le signal. Il représente la vitesse de transmission, et il est crucial que l'émetteur et le récepteur utilisent le même baud rate pour assurer une transmission correcte des données.
Pour que deux appareils, ici le PC et la carte du laboratoire, communiquent via USART en mode asynchrone, ils doivent être configurés de manière identique.
3.1 Registres
Une description complète :
- Des trois registres de contrôle.
- Du registre du baud rate.
- Des buffers de transmission/réception.
Se trouve dans la fiche technique de l’Atmega324P, au
Registre de Données USART n (UDRn)

RXB et TXB sont respectivement les buffers de réception et de transmission. Ils utilisent la même adresse d’E/S. Ainsi, RXB est accessible en lisant UDRn, et TXB en écrivant dans UDRn. Le buffer de transmission ne peut être écrit que lorsque le bit UDRE (USART Data Register Empty) dans le registre UCSRnA est à 1. Sinon, les écritures seront ignorées.
Registre de Contrôle et d'État USART n A (UCSRnA)

UCSRnA est le registre d’état du contrôleur de communication. Les bits les plus importants sont :
- RXCn – Réception Complète – devient 1 lorsqu’une donnée a été reçue mais n’a pas encore été lue. Il se réinitialise automatiquement lorsque le buffer de réception est vide.
- TXCn – Transmission Complète – devient 1 lorsque le buffer de transmission est vide.
- UDREn – Registre de Données Vide – devient 1 lorsque le buffer de transmission peut accepter de nouvelles données.
Registre de Contrôle et d'État USART n B (UCSRnB)

UCSRnB est un registre de contrôle. Les bits importants sont :
- RXCIEn – Interruption Réception Complète Activée – lorsqu’il est mis à 1, le contrôleur de communication génère une interruption lorsque des données sont reçues.
- TXCIEn – Interruption Transmission Complète Activée – lorsqu’il est mis à 1, le contrôleur génère une interruption lorsque le buffer de transmission est vide.
- UDRIEn – Interruption Registre de Données Vide Activée – lorsqu’il est mis à 1, le contrôleur génère une interruption lorsque le buffer de transmission peut accepter plus de données.
- RXENn – Activation du Récepteur – si 0, la réception des données est désactivée.
- TXENn – Activation du Transmetteur – si 0, la transmission des données est désactivée.
- UCSZn2 – avec
UCSZ1etUCSZ0dans le registreUCSRC, sélectionne la taille d’un mot de données.
Registre de Contrôle et d'État USART n C (UCSRnC)

UCSRnC est un autre registre de contrôle. Bits importants :
-
UMSELn – Sélection du Mode – 0 pour le mode asynchrone, 1 pour le mode synchrone.
-
UPMn1, UPMn0 – Mode de Parité – Ces deux bits permettent quatre configurations possibles, comme indiqué dans le tableau ci-dessous :
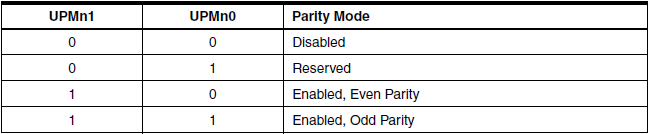
-
USBSn – Sélection du Bit d'Arrêt – 0 pour un seul bit d'arrêt, 1 pour deux bits d'arrêt.

-
UCSZn1, UCSZn0 – avec
UCSZn2dans le registreUCSRnB, sélectionne la taille du mot de données.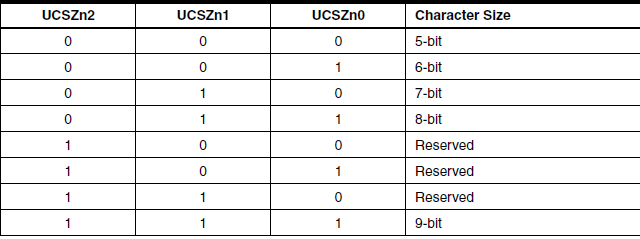
Registres de Baud Rate USART (UBRRn)
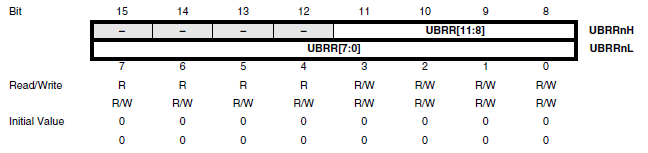
UBRRn est le registre qui définit le baud rate et comporte 12 bits. Les 4 premiers bits sont dans UBRRnH, tandis que les 8 restants sont dans UBRRnL. La valeur écrite dans UBRRn dépend de la fréquence d'horloge du processeur et du baud rate souhaité.
Le tableau ci-dessous est utilisé pour des fréquences d'horloge de 8MHz, 11.0592MHz et 14.7456MHz. Notre carte fonctionne à 12MHz, donc nous pouvons trouver la valeur correspondante du baud rate ici ou la calculer à l'aide de la formule :
(F_CPU / (UART_BAUD_RATE * 16) - 1),
où F_CPU est la fréquence d'horloge du processeur et UART_BAUD_RATE est le baud rate choisi (ex. 4800, 9600, 14400).
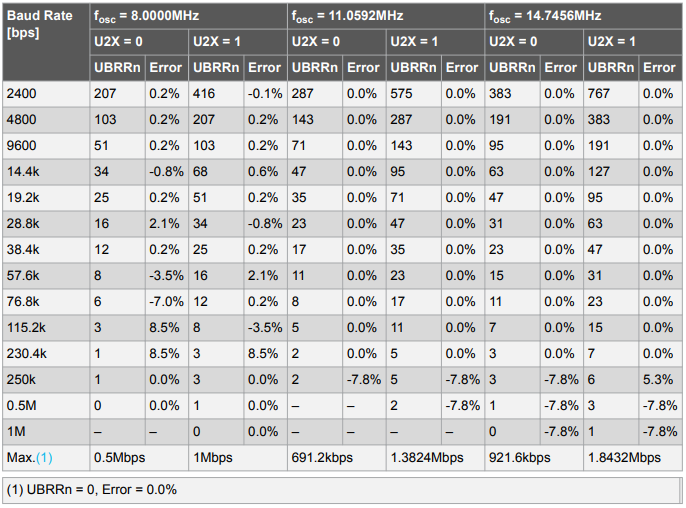
Il est recommandé de sélectionner un baud rate qui peut être dérivé exactement de la fréquence d'horloge. Sinon, une tolérance est définie (erreur maximale du baud rate) dans laquelle la communication reste acceptable. Si vous souhaitez approfondir ce sujet, consultez cette ressource.
Pour définir le baud rate, vous pouvez également utiliser la bibliothèque util/setbaud.h, conçue pour simplifier le processus. Il suffit de définir la fréquence d'horloge du processeur. Plus de détails et des exemples d'utilisation sont disponibles ici.
3.2 Exemple d'Utilisation
void USART0_init(unsigned int baud_rate)
{
/* Set baud rate */
UBRR0H = (unsigned char)(baud_rate >> 8);
UBRR0L = (unsigned char)baud_rate;
/* Enable transmitter and receiver */
UCSR0B = (1 << TXEN0) | (1 << RXEN0);
/* Set frame format: 8 data bits, 2 stop bits, no parity */
UCSR0C = (1 << USBS0) | (3 << UCSZ00);
}
void USART0_transmit(unsigned char data) {
/* Wait until the buffer is empty */
while (!(UCSR0A & (1 << UDRE0)));
/* Load data into the buffer; transmission starts automatically */
UDR0 = data;
}
char USART0_receive()
{
/* Wait while the buffer is empty */
while (!(UCSR0A & (1 << RXC0)));
/* Return data from buffer */
return UDR0;
}
Écriture de Valeurs sur 16 Bits
** (3 << x) **
Pour les bits de configuration toujours situés les uns à côté des autres, un masque avec plusieurs bits décalés de l’index le plus à droite est utilisé :
(3 << UCSZ00) remplace (1 << UCSZ01) | (1 << UCSZ00)
** (1 << x) | (1 << y) **
La plupart du temps, nous allons créer des masques composites, en les appliquant simultanément à un registre d’E/S.
Attention ! Vous ne pouvez composer des masques que pour la même opération. Vous ne pouvez pas appliquer un masque OR en même temps qu’un masque AND, car cela entraînerait des résultats incorrects.
4. Exercices
- Travail labo
- Devoir
Exercices au labo
Tâche 1
En utilisant le squelette du laboratoire fourni, configurez USART0 avec les paramètres suivants :
- Baud rate : 28800
- Bits de données : 8
- Bits d'arrêt : 2
- Parité : Aucune
Transmettez le message "Button 1 was pressed" au PC lorsque le bouton 1 (PB2) est pressé.
Les définitions dans AVR Libc nécessitant des calculs de fréquence d'horloge dépendent du paramètre F_CPU, fourni par le compilateur.
Puisque nous utilisons PlatformIO, n'oubliez pas de définir l'horloge à 12MHz dans platformio.ini
(voir la documentation officielle) :
board_build.f_cpu = 12000000L
Pour spécifier le baud rate de la console série dans VSCode avec PlatformIO, utilisez la variable suivante dans platformio.ini :
monitor_speed = 28800
Pour voir les messages saisis dans le moniteur série :
monitor_echo = true
Tâche 2
En utilisant le squelette du laboratoire, implémentez une nouvelle fonction :
void USART_exec(unsigned char command);
Cette fonction doit accepter les commandes suivantes reçues via USART :
- "on" – allumer la LED RGB en couleur blanche.
- "off" – éteindre la LED RGB.
- "red", "green", ou "blue" – configurer la LED dans la couleur spécifiée.
Configuration des broches de la LED RGB
- Rouge - PD5
- Vert – PD7
- Bleu – PB3
Tâche 3
Envoyez votre nom via l'interface série.
En utilisant l'"alphabet_morse" du squelette du laboratoire et le buzzer, générez la représentation en code Morse de votre nom.
Tâche Bonus : Feu de signalisation contrôlé par USART
Implémentez un système de feu de signalisation contrôlé via USART en utilisant la LED RGB de la Tâche 1.
Comportement
- La LED reste rouge par défaut.
- Lorsqu’un message "pedestrian" est reçu via USART :
- La LED devient jaune pendant 2 secondes.
- La LED devient verte pendant 5 secondes.
- La LED revient à rouge jusqu'à la réception d'un nouveau message "pedestrian".
- Si un message autre que "pedestrian" est reçu, envoyez "incorrect command" via USART.
- Pendant les transitions de couleur, les nouveaux messages USART doivent être ignorés.
if (strcmp(received_command, "pedestrian") == 0) {
// Handle traffic light sequence
} else {
USART0_transmit("incorrect command");
}
Exercices Devoir
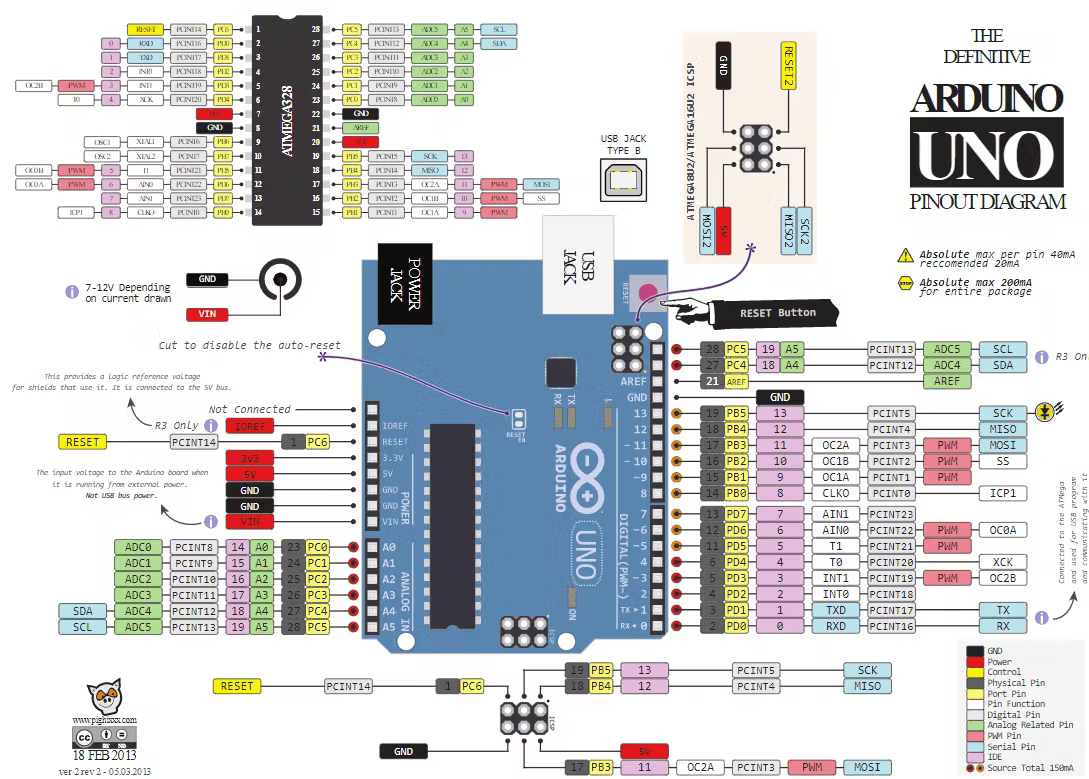
Puisque le devoir utilise l'Arduino qui est basé sur le microcontrôleur ATmega328, assurez-vous de bien vérifier les légères différences dans le pinout de cette carte.
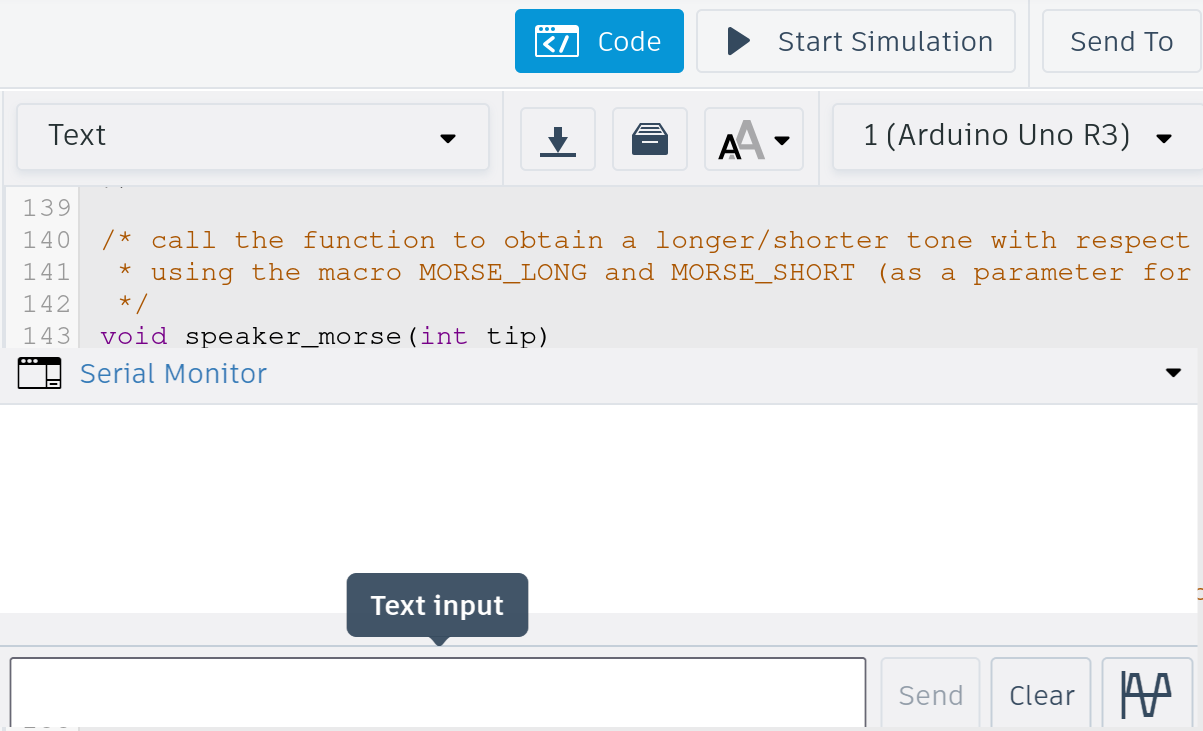
Commencez par acceder le projet ↗️ :
- Cliquez sur le bouton bleu "Sign up to copy" (ou "Copy and tinker" si vous avez déjà un compte). Assurez-vous d'ajouter votre vrai nom à votre compte.
- Dans le coin droit, trois boutons sont disponibles : "Code", "Simulate" et "Send to". Cliquez sur "Code" pour voir le code du squelette du laboratoire.
- Commencez à écrire les exercices à la ligne 156. Prenez le temps de lire tout le code précédent du laboratoire afin de mieux comprendre les fonctions existantes.
- Pour tester votre code, cliquez sur le bouton "Simulate".
- Pour ouvrir le moniteur série (où seront affichés les messages envoyés par USART et où vous pourrez envoyer des messages), cliquez sur le bouton "Serial Monitor" situé juste en dessous de la section du code.
Tâche 1
En utilisant le squelette du laboratoire fourni, configurez USART0 avec les paramètres suivants :
- Baud rate : 28800
- Bits de données : 8
- Bits d'arrêt : 2
- Parité : Aucune
Transmettez le message "Button 1 was pressed" au PC lorsque le bouton 1 (PB2) est pressé.
Tâche 2
En utilisant le squelette du laboratoire, implémentez une nouvelle fonction :
void USART_exec(unsigned char command);
Cette fonction doit accepter les commandes suivantes reçues via USART :
- "on" – allumer la LED RGB en couleur blanche.
- "off" – éteindre la LED RGB.
- "red", "green", ou "blue" – configurer la LED dans la couleur spécifiée.
Configuration des broches de la LED RGB
- Rouge - PD5
- Vert – PD7
- Bleu – PB3
Tâche 3
Envoyez votre nom via l'interface série.
En utilisant l'"alphabet_morse" du squelette du laboratoire et le buzzer, générez la représentation en code Morse de votre nom.
Tâche Bonus : Feu de signalisation contrôlé par USART
Implémentez un système de feu de signalisation contrôlé via USART en utilisant la LED RGB de la Tâche 1.
Comportement
- La LED reste rouge par défaut.
- Lorsqu’un message "pedestrian" est reçu via USART :
- La LED devient jaune pendant 2 secondes.
- La LED devient verte pendant 5 secondes.
- La LED revient à rouge jusqu'à la réception d'un nouveau message "pedestrian".
- Si un message autre que "pedestrian" est reçu, envoyez "incorrect command" via USART.
- Pendant les transitions de couleur, les nouveaux messages USART doivent être ignorés.
if (strcmp(received_command, "pedestrian") == 0) {
// Handle traffic light sequence
} else {
USART0_transmit("incorrect command");
}